![]()
Bauprojekt "Codename TINY"
 Baumusterskizze, Octocopter, klappbare Tragarme
Baumusterskizze, Octocopter, klappbare TragarmeDie Aufnahmen wurden mit der Mavic gemacht Die Mavic könnte locker unter Tiny durchfliegen, wenn sie Tiny nicht als Hinderniss ansehen würde.
Tiny hat jetzt, wie der Soldat auch, durchgehende Metallpuschen mit Schaumstoff ummantelt.

Von den angezeigten 9 Kg sind 2,5 Kg abzuziehen, da auf der Waage noch ein Brett liegt. Also Abfluggewicht 6,5 Kilo mit den 10000 Mah Akkus. Also Platz für eine Zuladung von 3,5 Kilo.
Tiny lässt das völlig kalt. Der Copter ist ist davon in seiner Manövrierfähigkeit völlig unbeeinflusst.
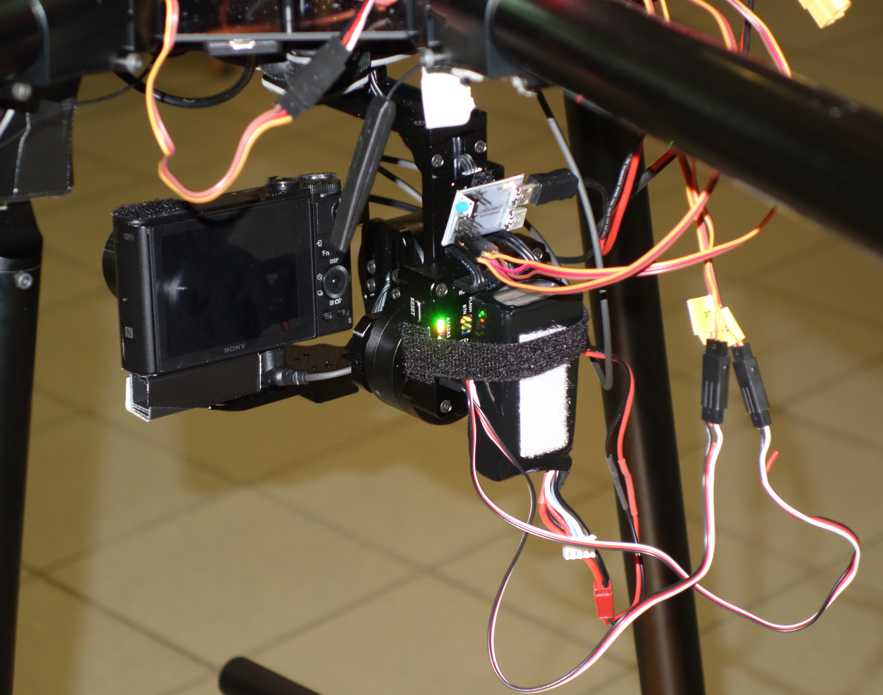
Tiny erhält einen steuerbaren Lasthaken und kann damit eine Last tragen und auf Knopdruck abwerfen. Geplant ist, das maximal eine Last von 1 Kilo mitgenommen werden kann. Damit diese das Gimbal nicht stört, hängt die Last an einer Kette, welche auf einer Seite ausgeklinkt werden kann.
Entfernung zur Kreuzung: 560 (Fünfhundertundsechsig!) Meter! Noch ist die Kamera nicht optimal eingestellt, aber es lässt sich jetzt bereits erkennen, was mit diesem Copter möglich wird.
Verglichen mit dem ersten Test hat Tiny jetzt gelernt, die Cam zu leveln, d.h. den Horizont gerade auszurichten. Allerdings passiert dies bei einer Drehung der Cam immer erst nach dem Ende der Drehbewegung. Das 30 fach Zoom ermöglich satte Vergrößerung. Allerdings wird das justieren der Yaw und Pitchachse bei vollem Zoom sehr schwierig. Hier ist die kleinste Änderung manchmal schon zuviel. Die manuelle Justierung eignet sich noch nicht dazu, Ziele zu verfolgen. Noch nicht.

Tiny hat jetzt 2 x 10.000 mAh Akkus. Kleines Problem dabei: Die Akkus passen nicht mehr unter den Helm, der ja noch vom 840H stammte. Daher bekam Tiny einen neuen Helm (Innendurchmesser satte 28 cm).

Die Cam sendet Bild an den 10" Monitor auf dem Stativ.


24.04.: Es wird ernst: Bei starkem Wind (so stark, dass die RX100 Cam fast ohne Copter vom Autodach abhebt!) kommt es zum Jungfernflug. Tiny begreift, dass er ein Fluggerät ist und erhebt sich in die Luft. Durch den starken Wind wird es schwierig, nah genug an die Cam auf dem Autodach zu navigieren. Schließlich soll weder Copter, noch Cam oder das Auto Schaden erleiden. Daher ist der Copter entweder klein im Bild oder schon vom Winde an der Cam vorbeigeweht.
Als nächstes erfolgt die Fimejustierung der Naza Gains, was dann eine stabilere Position ermöglicht. Noch ist Tiny mit 15 Zoll Übungsprops ausgestattet. Wenn er in den aktiven Dienst geht, dann kommen 18 Zoll Props mit fast 50cm Länge zum Einsatz. Da ist einer so lang wie die ganze Inspire 1!
24.04.: Letzter Testlauf bevor es nach draußen geht.
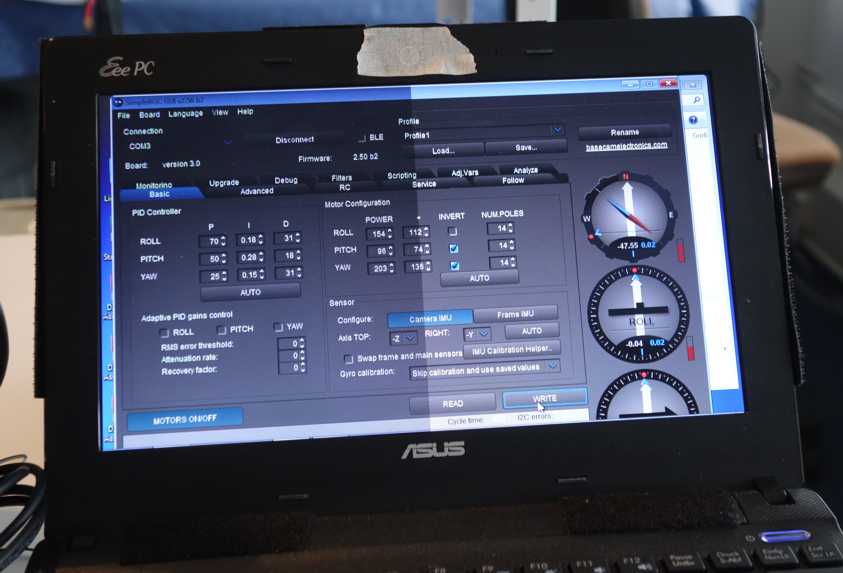
Die Taranis RC ist so eingestellt, dass neben 8 Sbus Kanälen 8 weitere konventionelle Kanäle zur Verfügung stehen. Davon bedient ein Kanal die Servos fürs Landegestell.


Die wird hier gerade auf einen DBus Sender konfiguriert. Ganz rechts auf dem Tisch ist die neue Taranis 16 Kanal RC zu sehen.

8 Motorenträger und 8 Tragarme sind verkabelt und an die Plattform montiert.
Die Kabel kommen jetzt alle auf der Insel an. Jetzt müssen Empfänger, Bordcomputer installiert und verkabelt werden.
12.04.: Erster Probelauf der ESCs und Motoren.

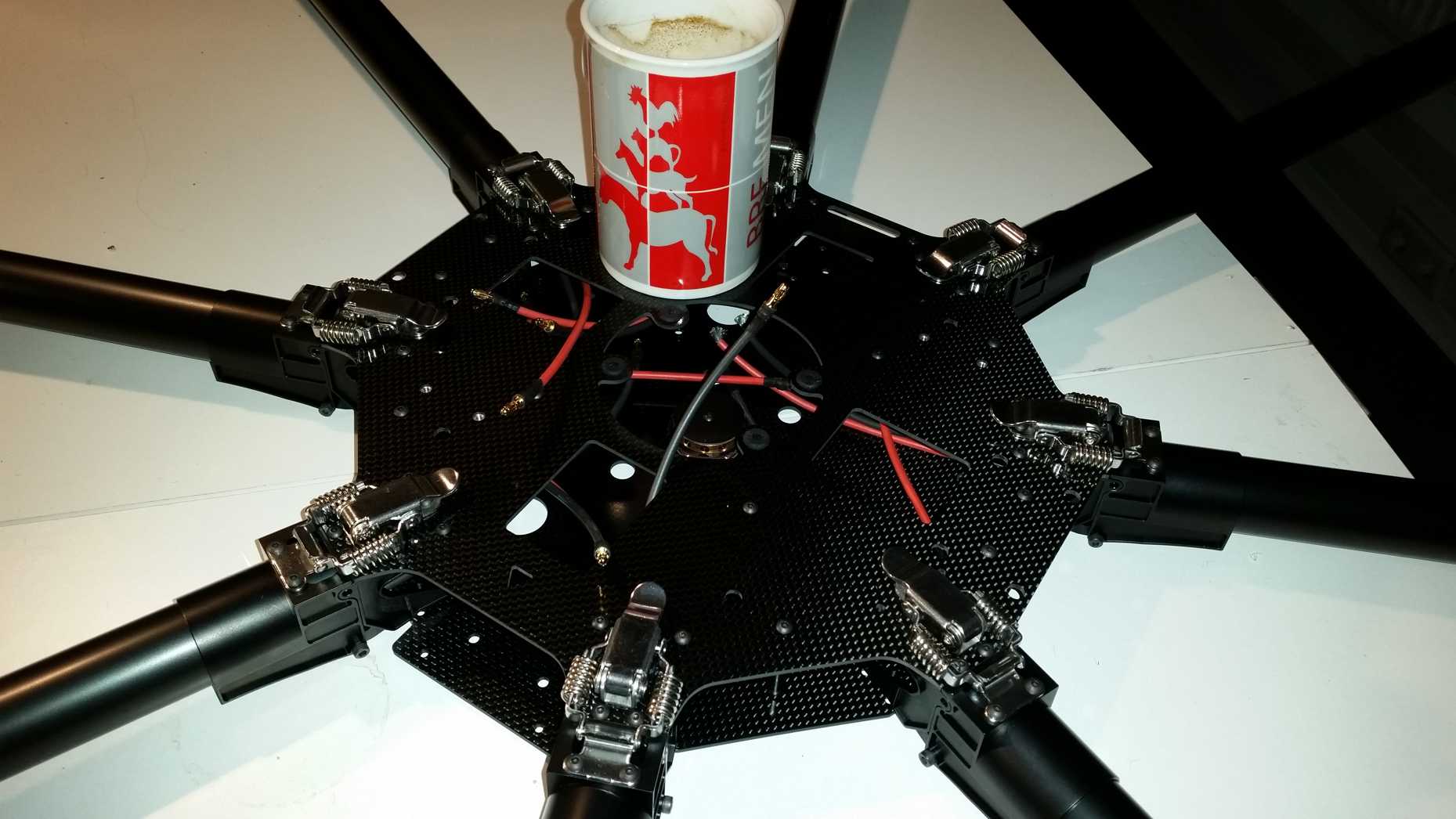
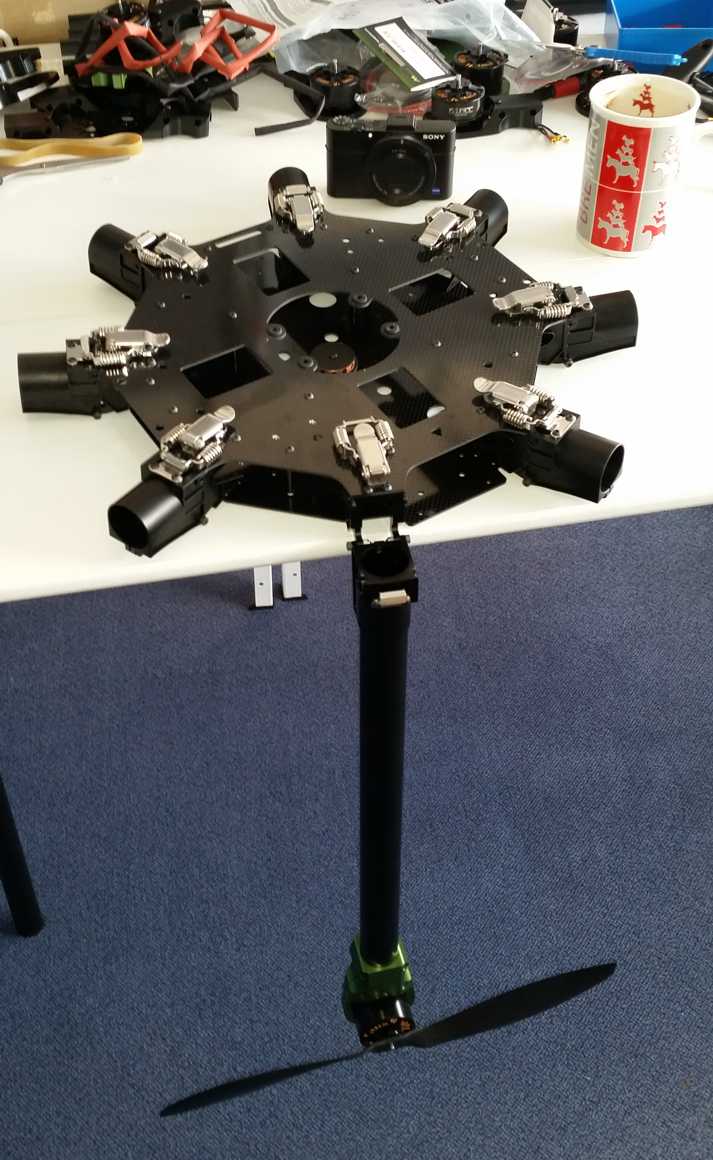
Auf diesem Bild sieht man die Plattform aufgebaut und einen Tragarm montiert. Der Kaffeebecher dient nicht nur als Maßstab, sondern ist auch reichlich in Benutzung.
Der Copter ist mit Schnellverschlüssen und klappbaren Tragarmen ausgestattet.
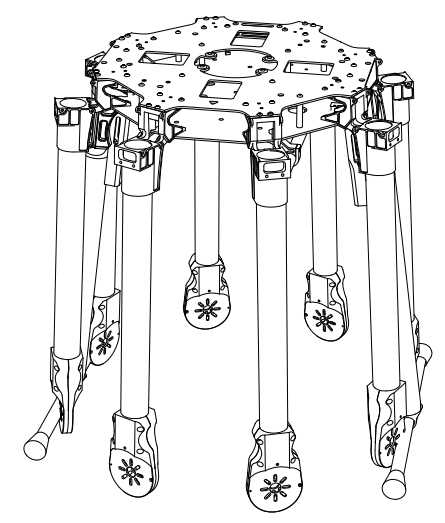
Das Landegestell:
Mit über 40 Zentimeter Bodenfreiheit, können auch höhere Unterbauten problemlos transportiert werden.


07.04.: Aus diesen Teilen entsteht ein Octocopter.

Motoren und Motorensteuergeräte.